Robotnačka II

The goal of the project is to improve the drawing mobile robot Robotnačka I (see project Robotnačka I ). Improvements are focused on preparing the robot for serial production so that the robot can be built using standard accessible parts.
The mobile robot Robotnačka II has the same purpose as its predecessor, for support of the educational process in connection with flexible environment Imagine Logo designed at the Department of Informatics Education, Comenius University in Bratislava.
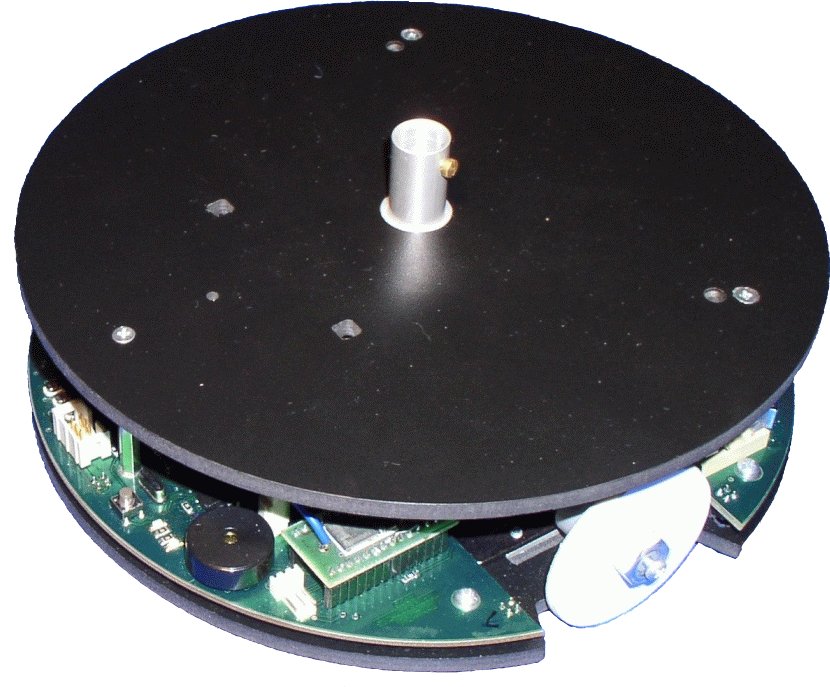
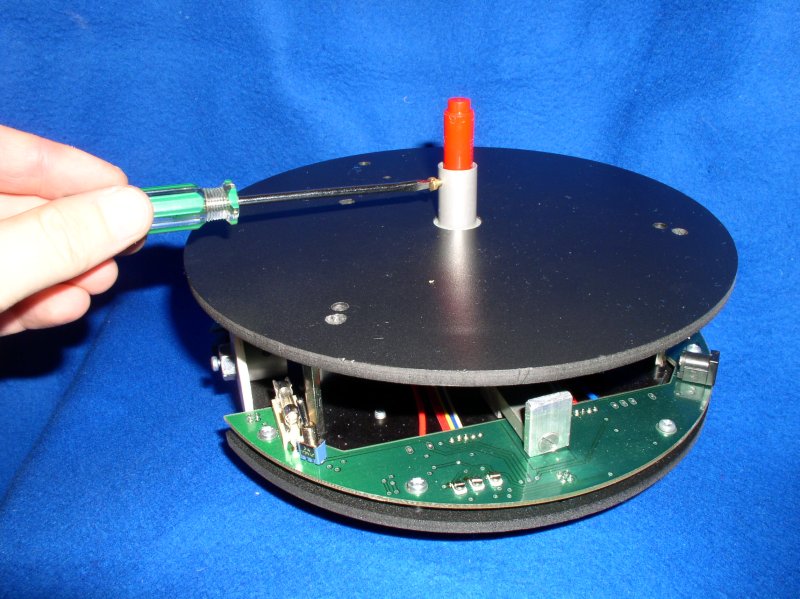
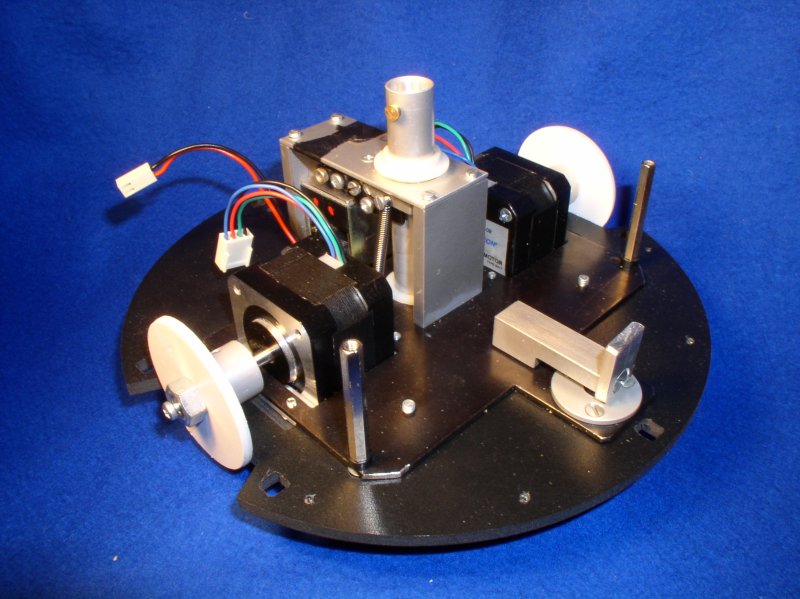
The second version is using the same reliable construction of three-wheeler with two propelled wheels and one supporting wheel. The wheels are driven by the stepper motors from MICROCON, which work in unipolar 8-cycle mode with 800 steps per rotation. Again, acceleration and deceleration is implemented carefuly to avoid loosing steps. The control of the engines is in an open-loop.
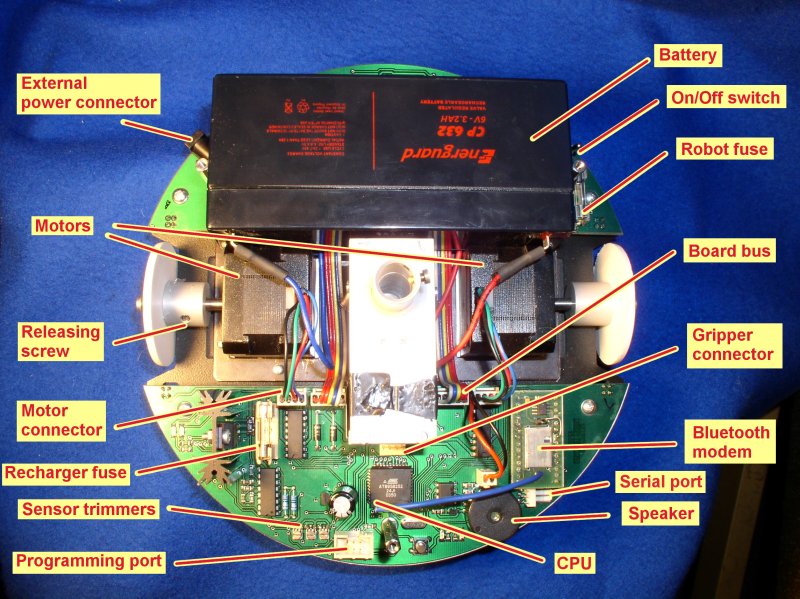
The central processing unit is the microprocessor ATMEL AT89S8252, which allows reprogramming during its opeartion - ISP. In addition to motors, the robot is equipped with a selenoid and magnet, which control the movement of the pen (it is new in this version, and replaces the motor in version I), the communication Bluetooth module from INFINEON, which allows wireless communication with a PC. The robot has the integrated accumulator recharger for its 6V 3.3Ah Pb accumulator, and six sensors placed at the bottom for table edge detection.
Communication:
The BlueTooth modules contain the HCI layer implementation, and
we have added the remaining necessary functionality so that the module
appears as virtual serial link. After the module is initialized, Robotnacka II
can be connected from an arbitrary BT device supporting the virtual serial port.
The robot responds to commands in a simple protocol. In executes the commands
and answers queries on the sensor and battery state. The BlueTooth technology allows
control of multiple robot simulatenously from the same computer without interference
and collisions. See also the project page on software
for this robot.
- Three-wheeler with two propelled wheels and one supporting wheel
- Stepper motors MICROCON SL17
- Solenoid with magnet
- 6V 3.3Ah maintenance-free Pb accumulator
- Wheel diameter: 50 mm
- Distance of wheels: 180mm
- Height of the base: 68mm
- Base diameter: 210mm
- Base width: 200 mm
- Number of impulses to turn 360 degrees: 2880
- CPU: 8-bit microcomputer AT89S8252
- Bluetooth module from INFINEON
Click on the pictures to view larger image.
 |
 |
 |
 |

