 Laboratórny manipulátor PM 01 je určený predovšetkým pre výučbu
študentov odboru Automatizácia. Vznikol v osemdesiatych rokoch
minulého storočia na Katedre automatizácie a regulácie vtedajšej
EF SVŠT v Bratislave. Spolu s pôvodnou riadiacou jednotkou bol
vytvorený celý (vrátane čítačky diernej pásky) z pneumatických
prvkov systému Dreloba.
Laboratórny manipulátor PM 01 je určený predovšetkým pre výučbu
študentov odboru Automatizácia. Vznikol v osemdesiatych rokoch
minulého storočia na Katedre automatizácie a regulácie vtedajšej
EF SVŠT v Bratislave. Spolu s pôvodnou riadiacou jednotkou bol
vytvorený celý (vrátane čítačky diernej pásky) z pneumatických
prvkov systému Dreloba.
Manipulačná časť robota pracuje v sférických súradniciach a jej pracovný priestor je guľový segment. Má štyri stupne voľnosti a nesie technologickú hlavicu prispôsobenú n prácu s valcovými predmetmi.
nosnosť do 0,5 kg pracovný priestor uhol otáčania okolo vertikálnej osi 340° uhol otáčania okolo horizontálnej osi 150° maximálne vyloženie hlavice 350 mm presnosť polohovania +/-3 mm
 Pneumatický manipulátor je schématicky zobrazený na obr. 1.
Dvojčinné pohony P0 až P3 slúžia na polohovanie pracovného ramena.
Pohon P4 je jednočinný a slúži na zovretie chápadla. Rozovretie chápadla
zabezpečuje vinutá pružina, ktorá je súčasťou pohonu P4.
Pneumatický manipulátor je schématicky zobrazený na obr. 1.
Dvojčinné pohony P0 až P3 slúžia na polohovanie pracovného ramena.
Pohon P4 je jednočinný a slúži na zovretie chápadla. Rozovretie chápadla
zabezpečuje vinutá pružina, ktorá je súčasťou pohonu P4.
Polohy jednotlivých pohonov vymedzujú pneumatické dorazy. Na obr. 1 sú označené písmnom D a dvojčíslom. Prvá číslica vyjadruje, ku ktorému pohonu daný doraz patrí a druhá číslica je jeho poradové číslo počnúc od referenčnej nulovej polohy.
Z obrázku vyplýva, že pohon P0 môže zaujať šesť polôh vymedzených dorazmi. Okrem toho môže zaujať dve krajné polohy - nulovú a polohu 7. Podobné označenie je aj pri ostatných pohonoch.
Pohony P0 a P1 sú vybavené pneumatickými hraničnými spínačmi S0 a S1, ktoré signalizujú dosiaahnutie niektorého z dorazov, alebo koncovej narážky.
Pohony pneumaticého robota neumožňuje spojité polohovanie. Pohon zastaví buď v krajných polohách, alebo pri dorazoch. Teda polohovanie je diskrétne a hlavica môže zaujať cca 800 bodov pracovného priestoru.
Všetky pohony použité na stavbu manipulátora sú z pneumatického systému Dreloba. Uvedená stavebnica obsahuje okrem ďalších stavebných prvkov aj elektro-pneumatické a pneumaticko-elektrické prevodníky vhodné na elektrické ovládanie manipulátora. Tie však v prvej verzii neboli využité a tak bola aj celá riadiaca jednotka vrátane čítačky diernej pásky pneumatická.
Keďže pneumatická jednotka neumožňovala programovať zložitejšie úlohy, ani ručné dierovanie pásky nebolo optimálne, v ďalšom období bol systém doplnený o zmienené prevodníky E/P a P/E a riadiaca jednotka bola nahradená najprv diskrétnymi elektronickými prvkami a neskôr školským mikropočítačovým systémom ŠMS VÚVT a ešte neskôr PP01.
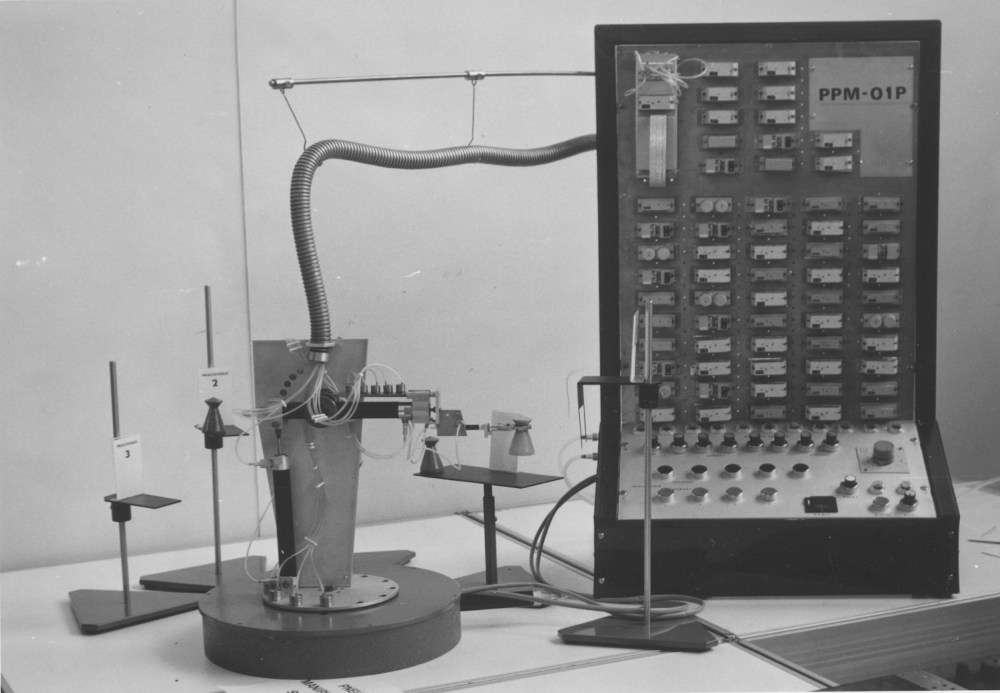
Umožňuje ovládať rameno buď z pneumatického snímača diernej pásky, alebo z ovládacieho pultu
Je to riadiaci automat s pevným programom, ktorý pracuje výhradne na báze pneumatických prvkov. Automat má zabudovný pevný polohovací cyklus, ktorý vždy začína návratom do referenčnej polohy na okraji pracovného priestoru a pokračuje sériovým polohovaním jednotlivých pohonov.
Priebeh polohovacieho cyklu je riadený časovacími RC pneumatickými prvkami a pri dvoch pohonoch pomocou spätných hlásení. Opakovaním polohovacieho cyklu sa rameno striedavo premiestňuje do referenčnej a funkčnej polohy určovanej programom na diernej páske. Takto navrhnutý polohovací cyklus je po stránke obvodovej realizácie mimoriadne jednoduchý, no z funkčného hľadiska má niekoľko nedostatkov. Trajektória chápadla je niekoľkonásobne dlhšia ako optimálna.
Nevýhodou je zložité polohovanie a zadávanie inštrukcií. Nie je riešená optimalizácia pohybov robota.
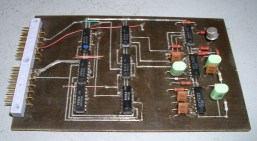 Je to jednoúčelový riadiaci automat vytvorený na báze TTL logiky
a tranzistorov. Pracuje ako sekvenčný elektronický obvod. Vstupné
signály sa generujú buď ručne, alebo z fotoelektrického snímača
diernej pásky. Na kódovanie inštrukcií sa používa 8-bitové slovo,
v ktorom posledné tri bity predstavujú kód inštrukcie. Má ich spolu 7:
nulovanie dorazov a pohonov, odľahčenie dorazov, nastavenie dorazov,
nastavenie pohonov, zmena pohybu pásky vpred, vzad a zastavenie pásky.
Zvyšných 5 bitov je určených na kódovanie adries pohonov a dorazov.
Je to jednoúčelový riadiaci automat vytvorený na báze TTL logiky
a tranzistorov. Pracuje ako sekvenčný elektronický obvod. Vstupné
signály sa generujú buď ručne, alebo z fotoelektrického snímača
diernej pásky. Na kódovanie inštrukcií sa používa 8-bitové slovo,
v ktorom posledné tri bity predstavujú kód inštrukcie. Má ich spolu 7:
nulovanie dorazov a pohonov, odľahčenie dorazov, nastavenie dorazov,
nastavenie pohonov, zmena pohybu pásky vpred, vzad a zastavenie pásky.
Zvyšných 5 bitov je určených na kódovanie adries pohonov a dorazov.
Nevýhodou je aj tu komplikované zadávanie inštrukcií, optimalizácia pohybu je riešená len čiastočne.
Použitie školského mikropočítačového systému ŠMS VÚVT (Žilina) na báze procesora Intel 8080 prinieslo niekoľko výhod. Zjednodušilo sa programovanie (1kB ROM, 1kB RAM), program umožnil pohyb niekoľkými pohonmi súčasne, umožnil optimalizovať čakacie slučky. Program bol vytvorený v asembleri procesora 8080.
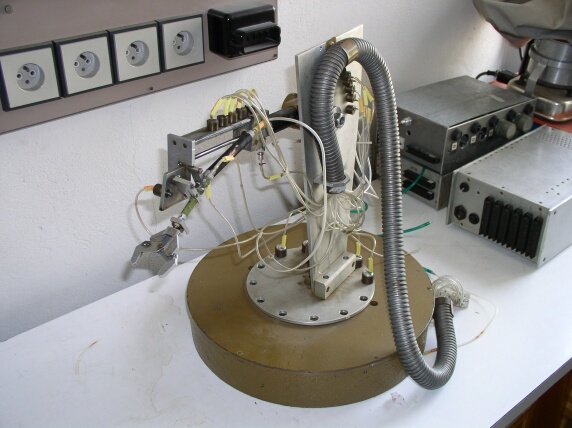 Celkový pohľad |
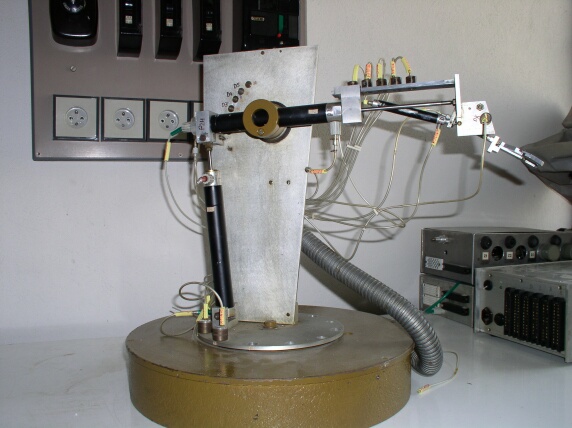 Pohľad zozadu |
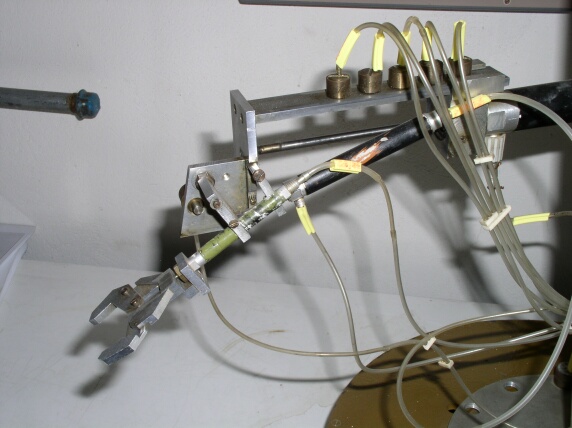 Detail chápadla |
 Komplet pneumatika |
 Nákres robota |
 E-P a P-E prevodníky |
© 2003 Richard Balogh
Posledná zmena: 21. novembra 2003.