Introduction
to Bayesian Robot Programming
and
Probabilistic Robotics
I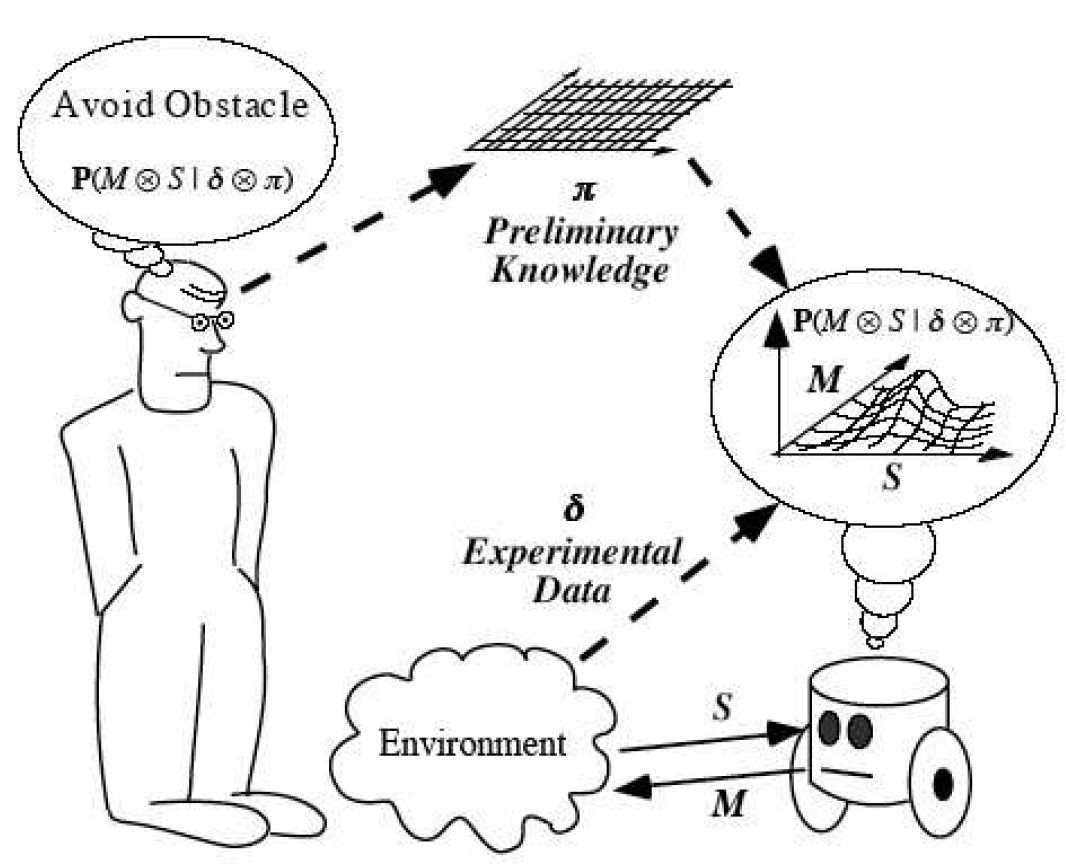 nformácie
o svete, ktoré roboty získavajú prostredníctvom
snímačov sú nepresné a môžu zodpovedať
viacerým stavom. Preto roboty modelujú svet, v ktorom
vykonávajú úlohy, pomocou pravdepodobností
a volia svoje akcie na základe pravdepodobnostných
výpočtov. Parametre distribúcií sa dokážu
naučiť z dát získaných z prostredia.
Prednáška je úvodom do problematiky
Pravdepodobnostnej robotiky.
nformácie
o svete, ktoré roboty získavajú prostredníctvom
snímačov sú nepresné a môžu zodpovedať
viacerým stavom. Preto roboty modelujú svet, v ktorom
vykonávajú úlohy, pomocou pravdepodobností
a volia svoje akcie na základe pravdepodobnostných
výpočtov. Parametre distribúcií sa dokážu
naučiť z dát získaných z prostredia.
Prednáška je úvodom do problematiky
Pravdepodobnostnej robotiky.
Pavel
Petrovič, Robotika.SK
V
stredu, 26. marca od 14:00 do 15:30
v
zasadačke D-424 na Fakulte elektrotechniky a informatiky STU v
Bratislave (Ilkovičova 3)
prednáška
bude po slovensky a v prípade medzinárodnej účasti
po anglicky