This is an unofficial translation of the rules. The only official version of the rules in cases of misunderstanding is the Slovak version.

Linefollower
category
The competition task
To build a autonomous mobile robot, which will travel the whole defined path in a certain time. The direction and course is defined by the dark line, also some obstacles are presented.
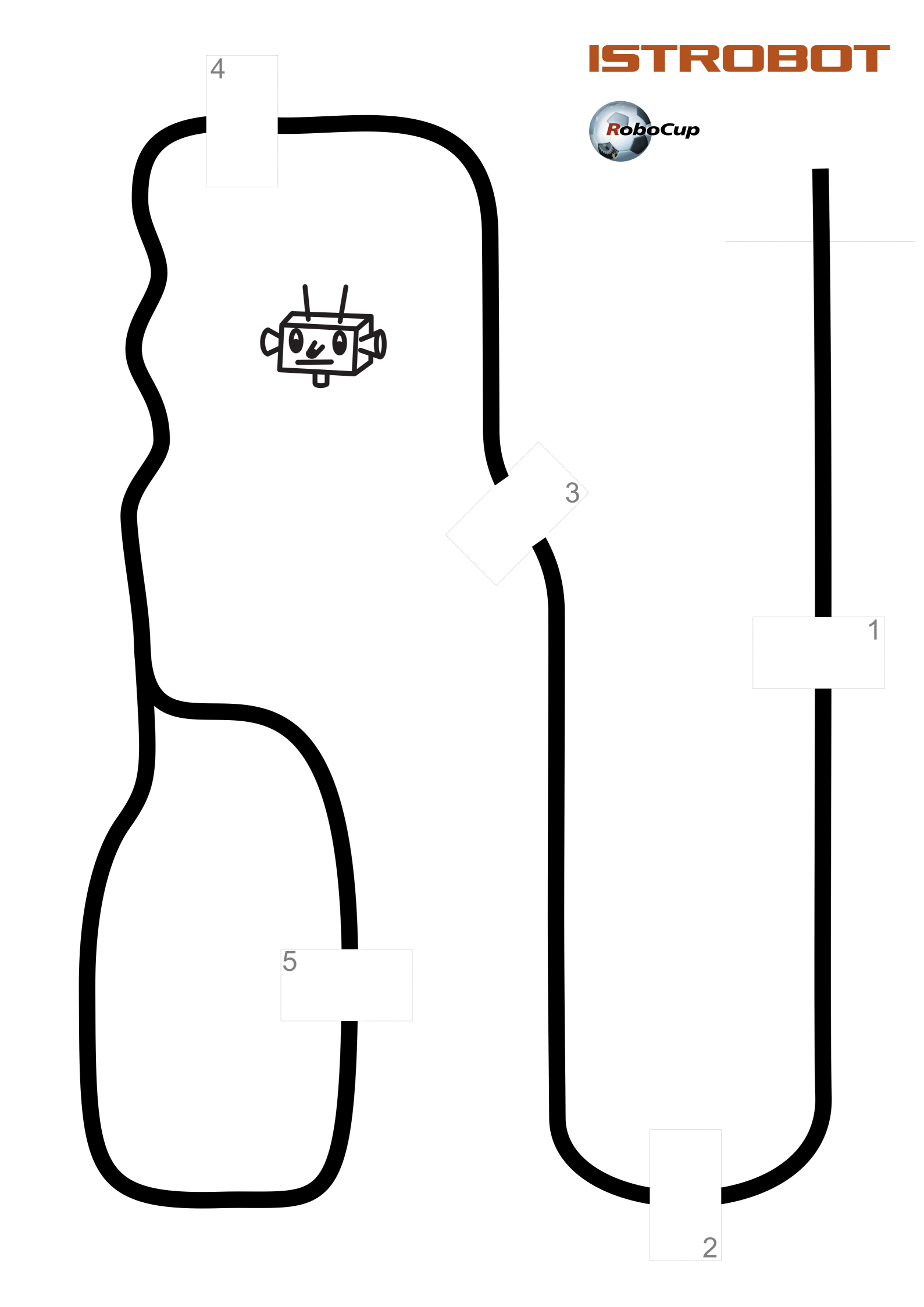
The path
The background of the path will be white with dark (black) navigation line on it (width 15 +/- 1 mm). Total length of the path won't be more than 20 meters. It can be printed by participant themselves, glued from smaller parts or you can order it from organizers.
The smallest radius of curves used in the path will be 5 cm Like in the real life, there can be random obstacles in the path (interrupted navigation line, obstacle on the line and other).
The robot's task is not to find the right way, just to follow the navigation line.
Unlike previous years, we will publish the track in advance. Obstacles on the track can occur only at pre-marked places, but their specific position will be announced to the participant just before the start. There is a safe area on each side around the line, but it is still possible for the robot to ride outside the area given by the pre-printed path. If the competitors make the track by themself, they must pay attention to the correct dimensions and smooth transitions between parts of the track. The track does not have to be printed in color, black and white print is also OK
Downloads:
- The .pdf of whole track A0
- The .pdf of track consisting of 20 x A4
- Additional parts: oil spill and line blinds
Obstacles
The path may contain various obstacles in various order. There is no guarancy that all of them will be present. Some of them may be presented more than once and they position can be changed between rounds. Obstacle position change is not a reason for protests.
- P2: Black course line can be anywhere interrupted (max. 7 cm)
Example...
- P6: Anywhere can be placed the obstacle brick. This obstacle used to be
avoided. The robot has to return to the black line max. 30 cm
after the brick.
Example...
- P9:
On any place, there can occur an "oil spoil" on the track.
Moreover, the track can change its direction under the spoil.
Example... - P10:
At the end of the track there will be a return loop to return the robot
back to the track in reverse direction.
Example...
Obstacles P2, P6 and P9 can only occur at the positions marked 1-5 on the track. The competitor will know their specific location just before the start. Unused positions for P2 obstacles (interruptions) may (but need not) be covered by the competitor with a black line. Obstacle P6 (brick) has dimensions of 250x120x65 mm and the competitor can replace it with any other material. However, if the robot comes into contact with an obstacle, it must not be moved, otherwise the rule about the damage of the competition track applies. Obstacle P9 (oil spill) must be placed by the competitor exactly according to the referee's instructions. The transition between the spoil and the track surface must be ensured by the competitor so that the robot does not have problems with it. A robot jam on any obstacle is not a valid reason for repeating attempts.
Robot operation
There must not be any interference between the robot and its team after the robot is set in the starting circle and turned on. The robot must be controlled only by its electronics.
The robot may not leave the line after crossing the starting line. Avoiding obstacles is the only one exception. While moving, the robot may not leave any marks or beacons on the table. No parts can remain on the path during the run.
The competitor is disqualified when the competition path is damaged.
Dimensions and size of the robot
Minimal nor maximal dimensions and weight are not limited.
The competition and the order of the competitors
The order of the competitors will be determined randomly just before the competition start.
At the competition day, the contestant will connect to the designated teleconferencing call via the Internet and set up his camera so that the entire robot is visible during the entire run. The camera can move and monitor the robot's movement.
At the jury request, the participant must declare his readiness and place obstacles on the course according to the instructions of the referee. Then he places the robot on the track anywhere in front of the starting line and announces readiness. Immediately after the referee's call, the robot must start and not interfere with its operation. At the same time, the time measurements starts. Any contact of the robot by the competitor will cancel this run. Each competing robot can try to run the track three times. The participant can use the time between attempts for any repairs and modifications. However, if he fails to start within 1 minute of the call to start, he loses the right to complete the attempt.
In the event that many competitors will apply, the jury may reduce the number of attempts allowed, or announce a qualifying round.
Time limits
The robot has 3 minutes to complete the path. After 3 minutes, the time measurement is stopped and the run is canceled. But the robot is not disqualified. The time stop has no affect on the next runs. Since we are not able to measure the time with an accuracy of better than 1 second in an on-line competition, all robots with a time of +/- 1 second will be placed in the same place.
Evaluation and prices
The winner is the robot with the shortest time from any of the three runs. Unfinished run will not be evaluated.
The jury can also award the robot with the best design or interesting construction. And, of course, all the common rules apply.
FAQ
-
How do I print such a big track?
It will be printed by your local printer shop without any problems. Prices range from 5,- to 10,- and usually even less. At home, you can print it from A4 papers that you glue together. In addition, you can order it from the organizer until the March 15th. -
How much will it cost?
10,- is printing, 3,- cylindrical tube, 3,-10,-€ are postal costs, depending on country - the final price will also depend on the number of orders. -
"Does the same route have to go back to sleep" does the same turn on a split line mean?
No, it's not necessarily. -
Which way should I go through the loop?
It does not matter. -
If I happen to get a brick in the 3rd position, do I have to put it at an angle?
Yes, exactly as indicated on the plane.