
Rules for the Flying challenge 2017
The competition task
To construct a flying machine that is able to deliver a payload over a specified path in shortest possible time. Path is specified within designated area with obstacles. For now, also the remote control is allowed, but such device will obtain lower points value. Winner is the machine with the highest number of points and shorter time achieved.Specifications
The race area is organized as on the Fig. 1. It is at least 8 meters long, 2 meters wide, 2 meters high. It is divided into the 4 fields, labeled A, B, C and D. Area 10 x 3 x 3 around the competition field is protected by the
The machine has to fly over the wall 0,6 meters height, then through the obstacle with opening in within 1,2 m and finally through the gap between two 2 m walls. Distances between obstacles are approx. 2 m.
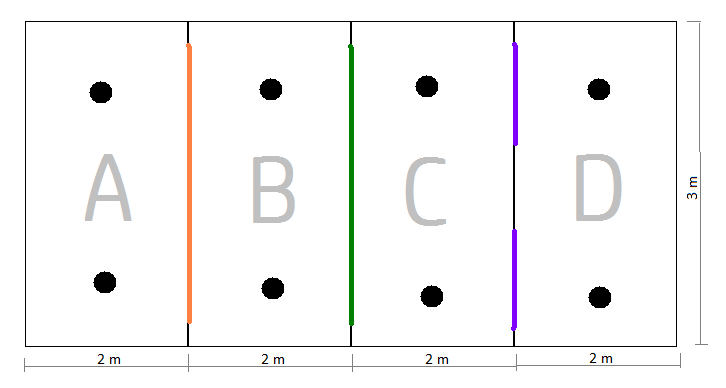
Fig. 1: Top view of the competition area.
Bottom floor of the competition area is of light color (not necessarily white) and there will be navigation marks presented. Except those, a competitor can use its own navigation markings on the floor or on obstacles provided that this will not damage the track. After the competition run, competitors are required to remove their navigational markings.
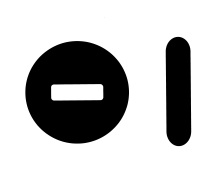
Fig. 2: Navigation markings.
Obstacles and Payload
Obstacle 1 between zones A and B is solid with dimensions 0,6 x 2 m. The flying machine has to fly over it. Obstacle 2 is a solid wall with opening on its bottom side with the dimiensions 1,2 x 2 m and flying machine has to underfly it. Obstacle 3 between zones C and D is variable. It consist of two walls with dimensions 0,6 x 2 m and flying machine has to fly through it either from left, right or middle according the configuration.
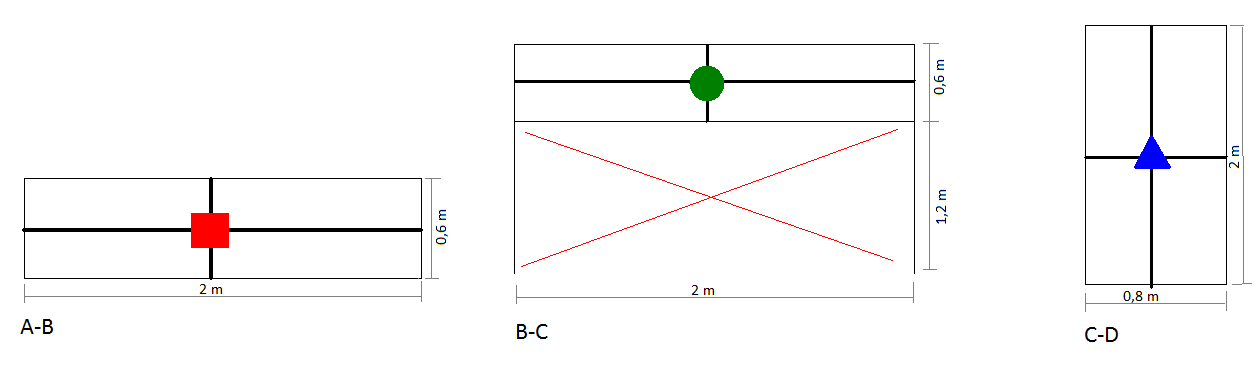
Fig. 3. Obstacles dimension.
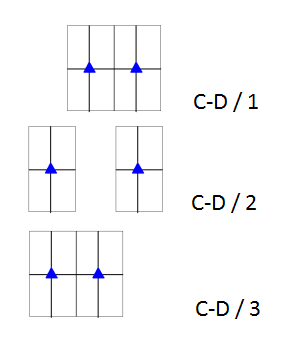
Fig. 4. Possible configurations of the obstacle 3.
Activity
The basic task is to fly predetermined path within designated area and with a payload as fast as possible. Start is from the ground in the middle of the area A, landing is possible anywhere in areas B-D. The time will be measured from the takeoff up to the successful landing.Size and dimensions of the flying robot
Robot can be a flying vehicle able to fly heights 0 to 3 m. It can be a plane, a helicopter, multicopter or airship with maximum allowed weight up to 2.5 kg. Maximal allowed speed of flight is 10 m/s. Machine dimensions cannot exceed the cube with the side 1 meter long. There is an exception for airships, those can be long up to 2 m (1 x 1 x 2 m).
Operator has to be able to control the robot anytime.
Safety
Not satisfying the safety rules leads to the disqualification.The machines and their operation must follow local laws for UAVs. Just an electrically propelled machines can compete, and they must be visibly labeled with their registration number. Airships can use only the inflammable and non hazardous gases. Vehicles cannot contain the sharp parts, except propeller blades.
Contestants are participating voluntarily and on their own risk and are fully responsible for their machines. Organiser accepts no responsibility for contestants flying machines other equipment damages.
Homologation
All contestants can attend the race only after homologation. Homologation will take place before first flight and consists of following checks:
- weight and dimensions,
- machine has to be able to fly in heights from 0.5 to 3 m
- competitor has to prove his ability to safely control the machine at all circumstances and demostrate his ability to turn off machine with safety switch,
- robot has to follow all safety rules.
Order of competitors, race organization
Race will take place in indoor environment. Order of competitors will be selected before the start of the competition. Order of competitors then stays fixed and cannot be changed. Each competitor will have 3 attempts to fly. If he does not start within 1 minute after the call to start, he is losing its try. The judges can declare additional qualification round. The flight can be at any time interrupted by the judge and this decision is definitive.
Evaluation and Time limits
Flight from start to any of four landing zones the machine is awarded according the table. If the robot carry also a payload, its point value is doubled. If the flight is controlled by the computer outside of the machine board, the point value is multiplied by 4. Fully autonomous flight is valued 8x. Best of the three independent flights is calculated. Winner will be the machine with the highest numbers of points. In the case of equal number of points winner will be the machine with the shortest time.
Each competitor has max. 5 minutes for each single attempt. The time is measured from the moment when the last part connected to the device lifts over the floor. The time measurement is stopped after the landing. Any touch with floor, safety net or obstacle means penalisation of +5 seconds.
| A | B | C | D | |
|---|---|---|---|---|
| Remote control, no payload |
0 | 1 | 2 | 3 |
| For payload: x2 | 0 | 2 | 4 | 6 |
| Semi-autonomous fly: x4 | 0 | 4 | 8 | 12 |
| Autonomous fly: x8 | 0 | 8 | 16 | 24 |
| Autonomous fly with payload: x16 | 0 | 16 | 32 | 48 |
Judges can decide to award an additional prices, for example for the most innovative construction.
And of course, all the common rules are valid.