
This is an unofficial translation of the rules. The only official version of the rules in cases of misunderstanding is the Slovak version.
Linefollower category
The competition task
To build a autonomous mobile robot, which will travel the whole defined path in a certain time. The direction and course is defined by the dark line, also some obstacles are presented.
The path
The background of the path will be white with dark (black) navigation line on it (width 15 +/- 1 mm). Total length of the path won't be more than 20 meters. Material used will be chipboard.The smallest radius of curves used in the path will be 5 cm. Total rising of the path won't exceed 3 cm; maximal rising or declining is 5%. Like in the real life, there can be random obstacles in the path (interrupted navigation line, obstacle on the line, illumination changes and other).
The robot's task is not to find the right way, just to follow the navigation line. The line remains unchanged for the duration of the competition, so robot can learn from previous runs and for example complete straight stages in a faster time.
The robot starts within the starting area, which is 30 cm before the start line (infrared beam of the time measuring device,cca 10 mm above ground). When the beam is interrupted by any part of the robot, the time starts to be measured.
The path is closed (round), and in the start (that is also the finish) area will be short (10 cm) perpendicular dark stripe on the line located. This stripe will mark the start/end to help recognize it for fully autonomous self-learning robots. So can the robot better utilize the information from previous runs. If the strip is not necessary, the robot can start just after the strip on the path.
The time measurement is stopped when the similar beam of light located at the end of the path is interrupted.
There are no barriers at the edge of the contest area. On the each side
of the dark line will be the 15 cm wide safety area. Nevertheless, it is
recommended to implement the safety device to avoid the fall from the edge.
Organizers can not guarantee that area around the arena will be open. Hence
the authors used to carefully evaluate the sensor measurements, especially
near the arena edges.
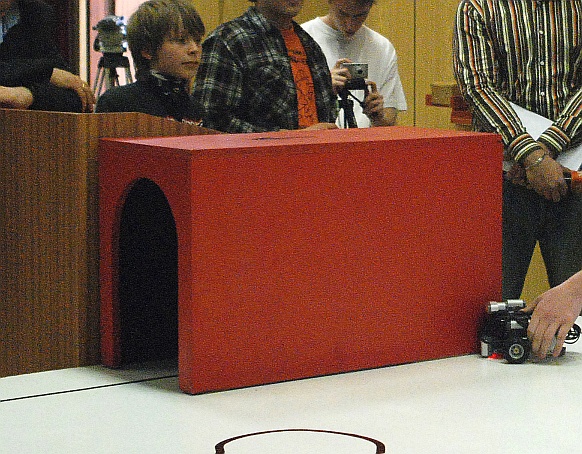
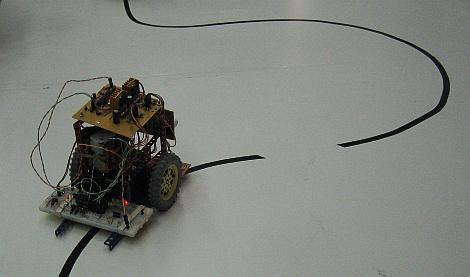
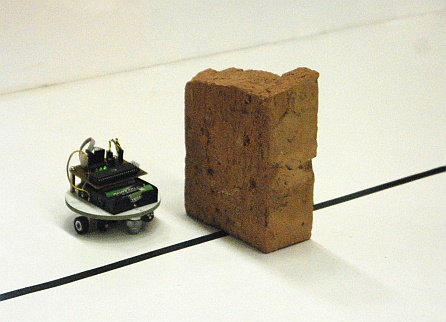
Obstacles
Example...
Example...
Example...
Example...
Example...
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Robot operation
There must not be any interference between the robot and its team after the robot is set in the starting circle and turned on. The robot must be controlled only by its electronics.
The robot may not leave the line after crossing the starting line. Avoiding obstacles is the only one exception. While moving, the robot may not leave any marks or beacons on the table. No parts can remain on the path during the run.
The competitor is disqualified when the competition path is damaged.
Dimensions and size of the robot
The width and height of the robot cannot exceed 20 cm. Length of the robot is not limited. Please, notify the limits given by tunnels and circle radiuses during the run.
Minimal dimensions and weight are not limited.
The competition and the order of the competitors
The competitors must be prepared to the start within 1 minute after the call. Every robot has total 3 runs to compete. But if the competitor does not present within 1 minute after the call, the run is lost. The time between the runs can be used for fixing and adjusting the robot. In the case of too many competitors, the jury can decrease the number of runs, or it can proclaim a qualifying round.
Time limits
The robot has 3 minutes to complete the path. After 3 minutes, the time measurement is stopped and the run is canceled. But the robot is not disqualified. The time stop has no affect on the next runs.
Evaluation and prices
Each registered robot after reaching the end of line will be rewarded with the diploma. The winner is the robot with the shortest time from any of the three runs. The jury can also award the robot with the best design or interesting construction.
And, of course, all the common rules apply.