P4230199.JPG
403.87 KB
PB280124.JPG
678.54 KB
PB280125.JPG
688.81 KB
PB280126.JPG
643.79 KB
PB280127.JPG
636.80 KB
PB280128.JPG
660.81 KB
PB280129.JPG
609.45 KB

PB280130.JPG
623.01 KB
PIC00038.JPG
188.63 KB
[Novinky] [Pravidlá] [Roboti] [Poradňa] [Archív]
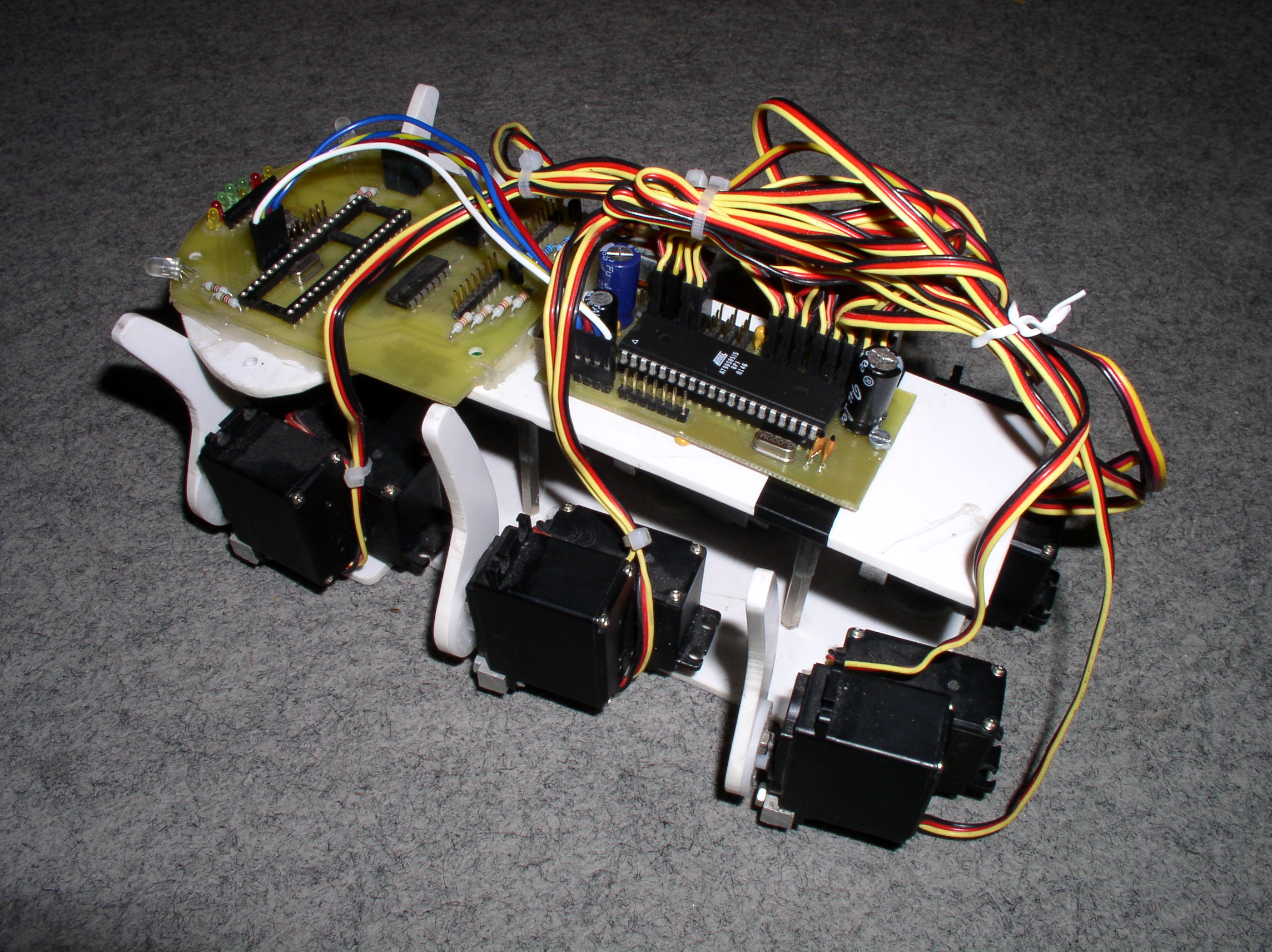
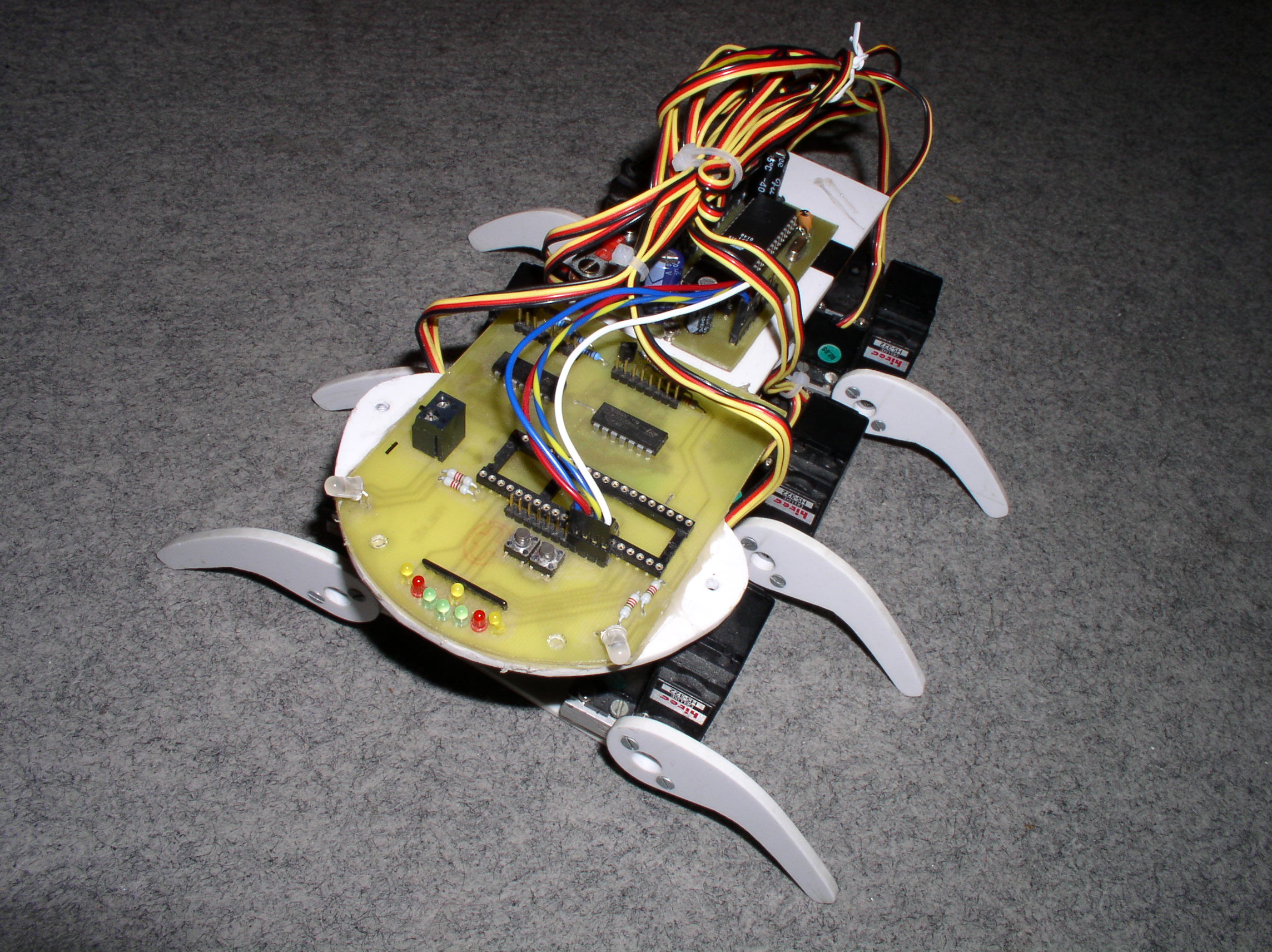
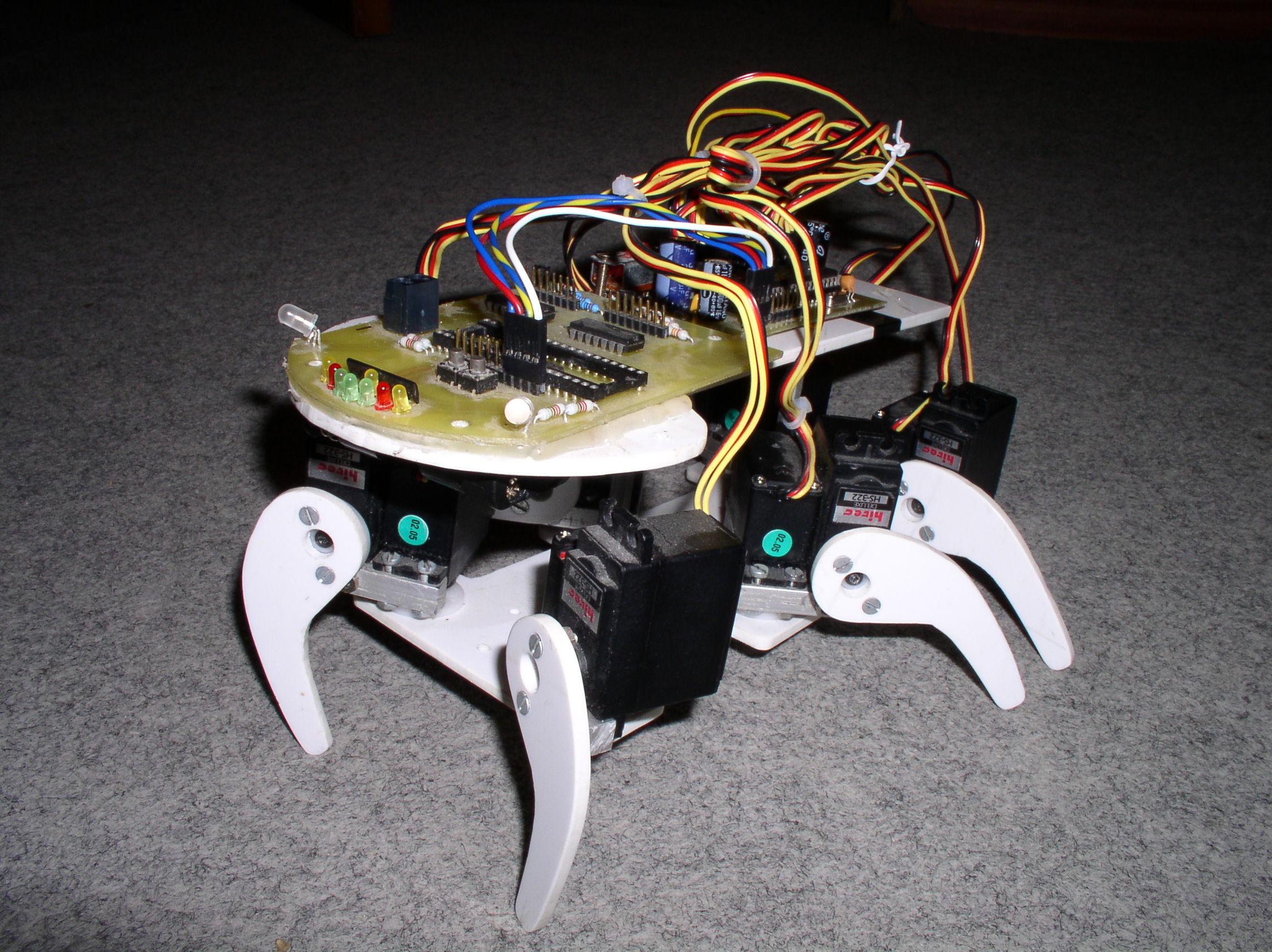
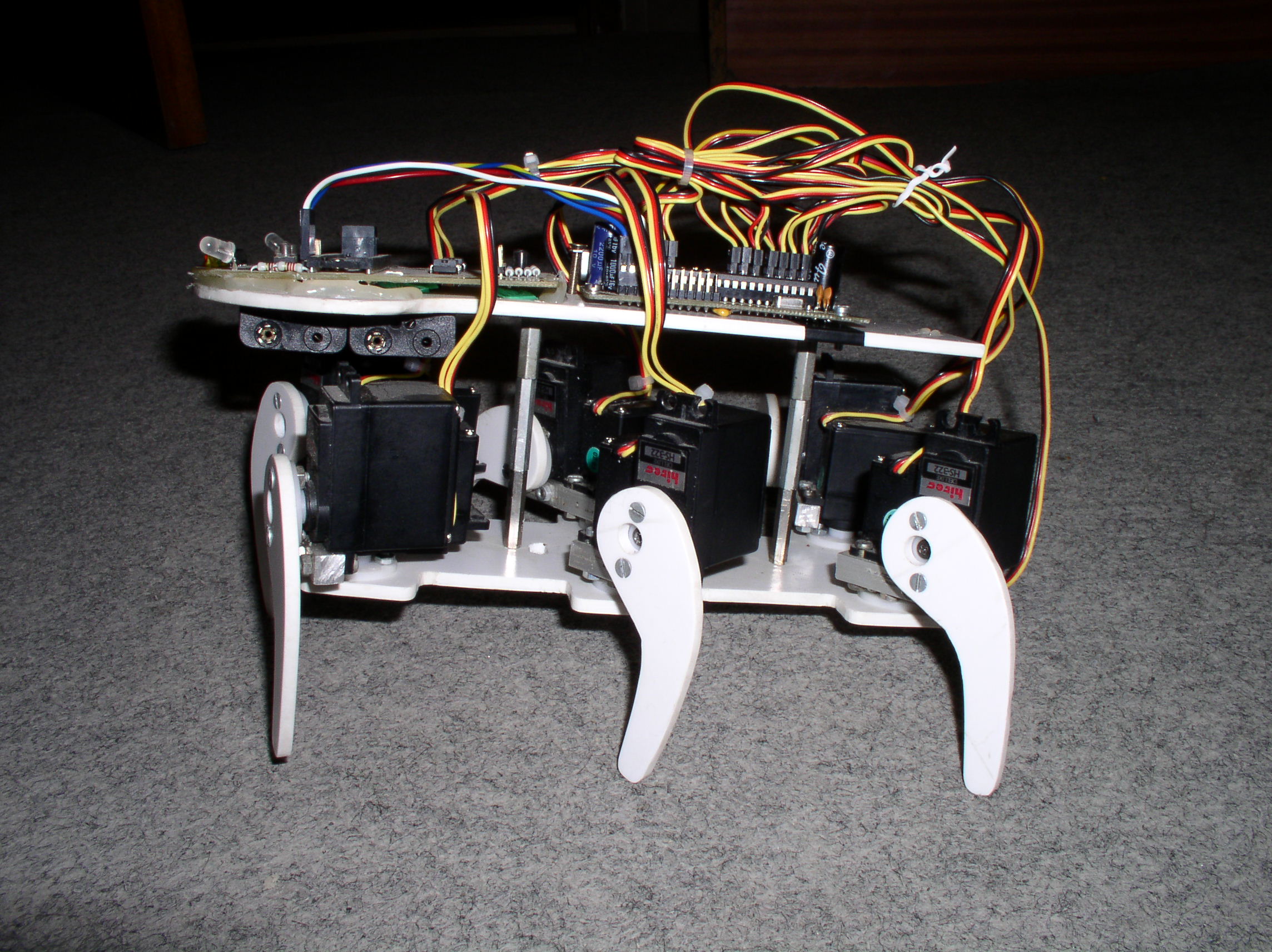
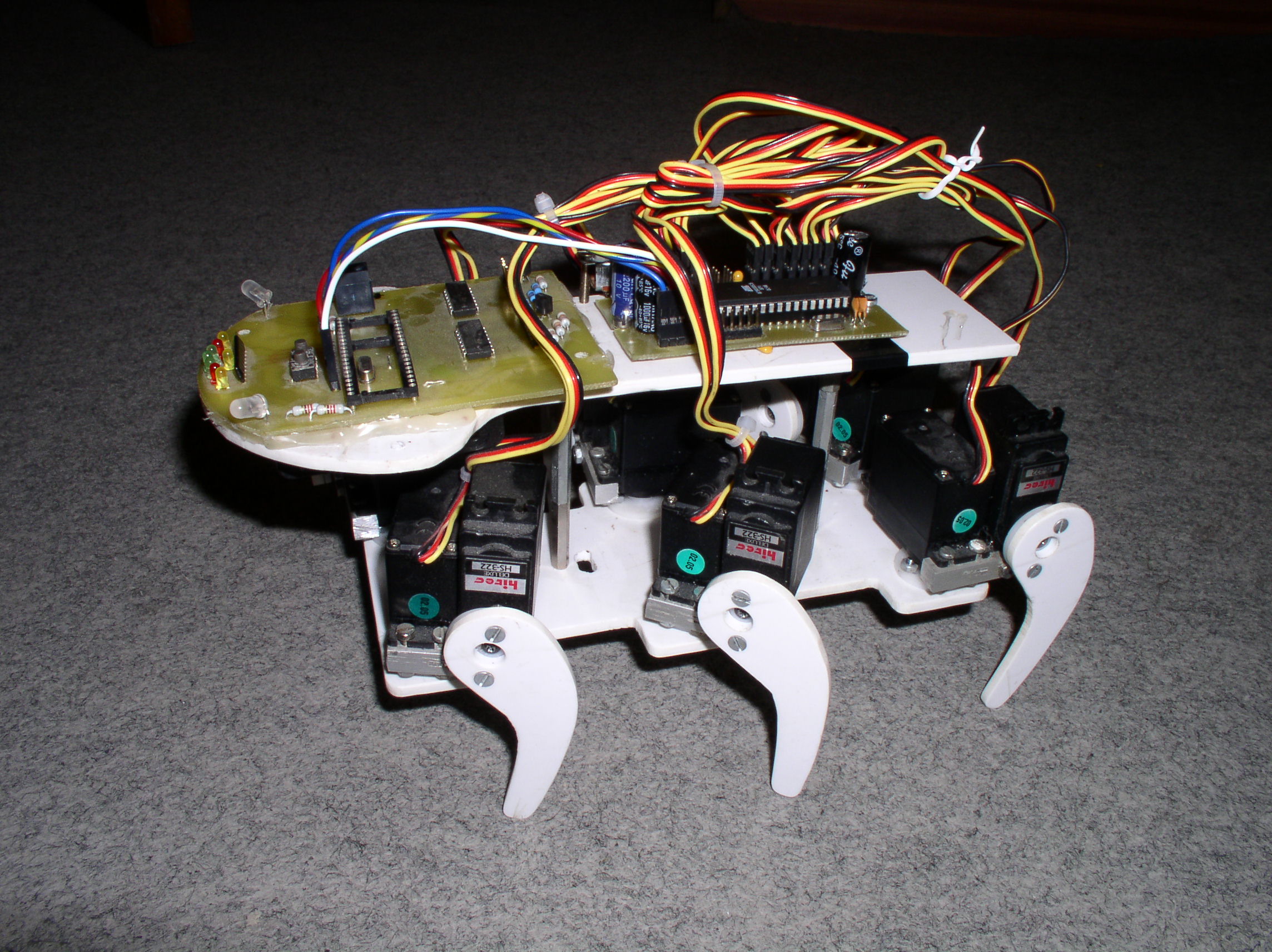
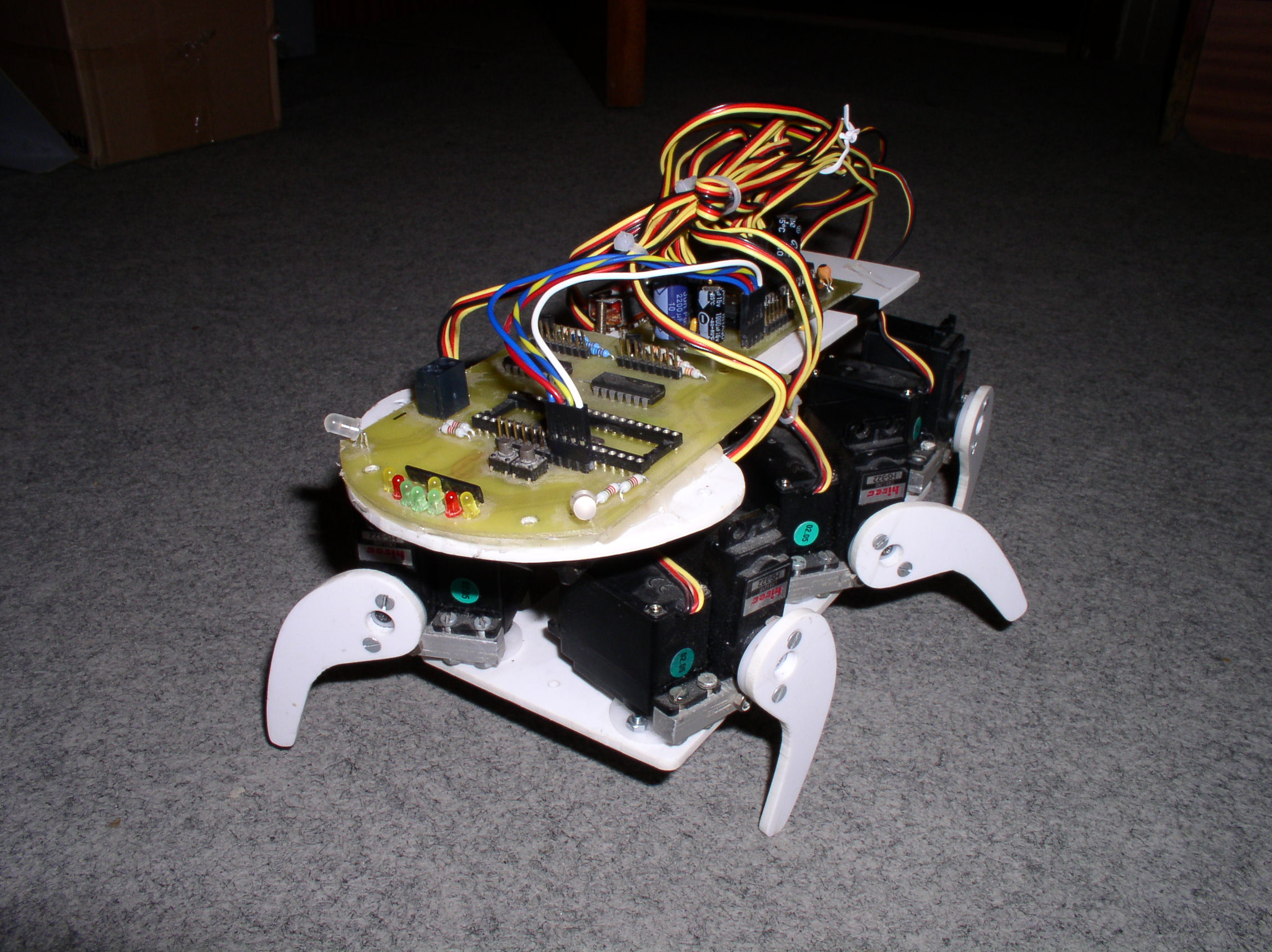
| Ridiaci procesor: | Atmel AT89S8515 |
| Veľkosť pamäte: | 2 kB |
| Frekvencia: | 8 MHz |
| Senzory: | zatiaľ nemá |
| Pohon: | 12 ks modelárske servo Hitec HS-322 |
| Napájanie: | 4 x akumulátor 1,5 V |
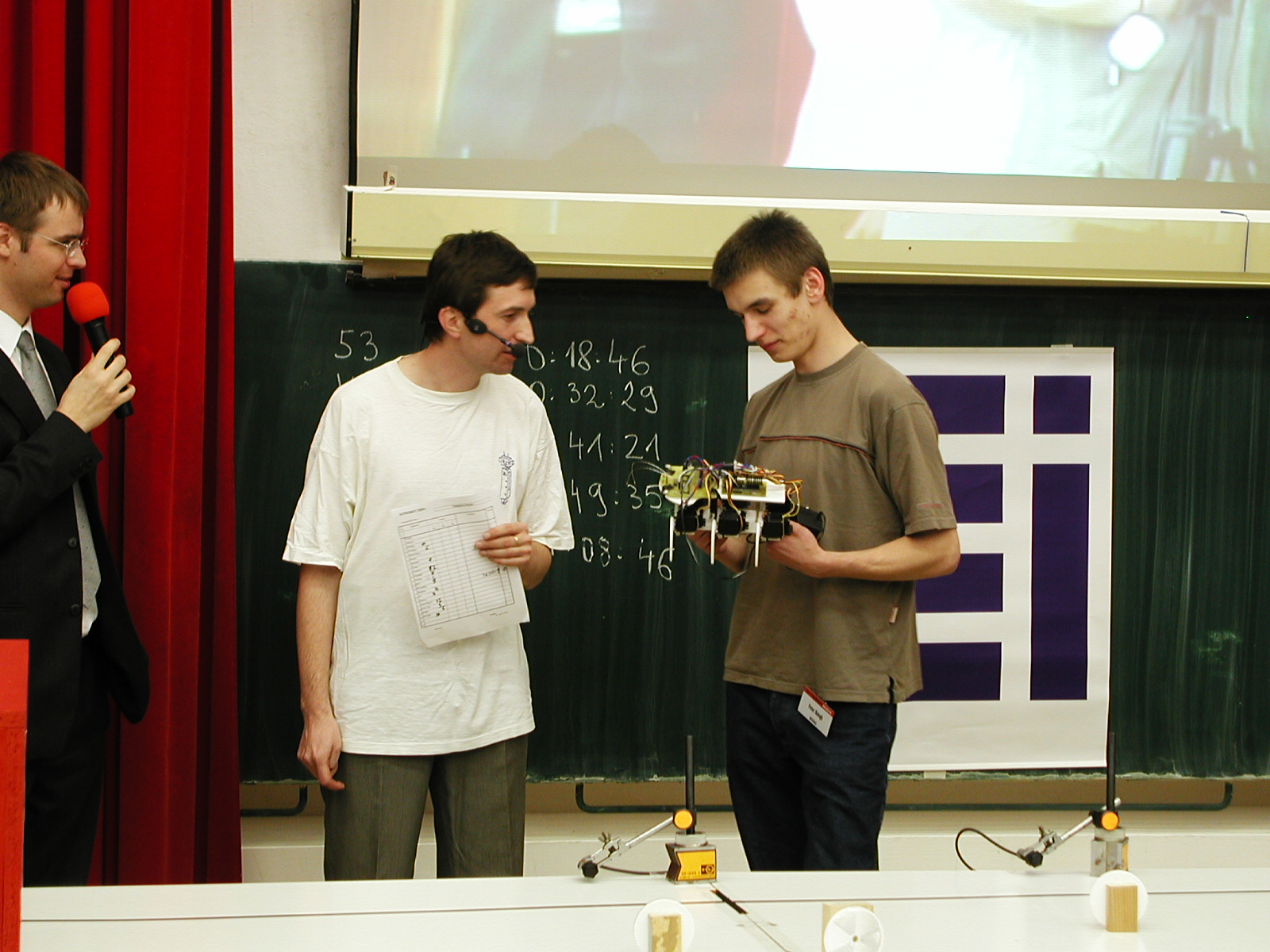
Je to šesťnohý kráčajúci robot, pričom každá noha je poháňaná dvoma servami. Robot je schopný chôdze aj v nerovnom teréne, rýchlosť je obmedzená použitými servami.
Autor je v súčasnosti študent FEI STU, robota postavil ešte ako študent elektrotechnickej priemyslovky (SPŠE K. Adlera v Bratislave).
Robota predvádzal v kategórii Voľná jazda na súťaži ISTROBOT 2003.
|
P4230199.JPG 403.87 KB |
PB280124.JPG 678.54 KB |
PB280125.JPG 688.81 KB |
|
PB280126.JPG 643.79 KB |
PB280127.JPG 636.80 KB |
PB280128.JPG 660.81 KB |
|
PB280129.JPG 609.45 KB |
PB280130.JPG 623.01 KB |
PIC00038.JPG 188.63 KB |
[Novinky] [Pravidlá] [Roboti] [Poradňa] [Archív]
© 2003 Richard Balogh
Posledná zmena: 28. novembra 2003.